针对目前视觉SLAM(同时定位与地图构建)系统只能输出相机的运动轨迹图而不能生成用于...用单目相机和RGB-D深度相机进行实时实验,实现了网格地图的实时构建,且能够清晰地显现出障碍物位置,验证了所提算法的有效性。
”ORB-SLAM2 逆传感器模型 网格地图 RGB-D相机“ 的搜索结果
ORB-SLAM2_RGBD_DENSE_MAP是基于ORB-SLAM2框架的一种RGB-D...ORB-SLAM2是一种基于单目、双目和RGB-D相机的实时定位与建图(SLAM)系统,旨在通过计算机视觉技术实现机器人和自主驾驶汽车等设备的自主定位和地图构建。
ORB-SLAM2代码/流程详解
标签: 自动驾驶


ORB-SLAM2知识点和面试汇总,持续更新!

ORB-SLAM:一种通用的(全能的)精确的单目SLAM系统 原文链接:https://blog.csdn.net/weixin_42905141/article/details/102857958 原文作者翻译的非常好,我在原文作者文章的基础上加入了自己的一些阅读...
本文介绍了ORB-SLAM2S,这是一种基于ORB-SLAM2的快速完整的SLAM系统,适用于单目、立体和RGB-D相机。该系统在小型和大型室内和室外环境中以更快的速度在CPU上同时确保准确性。该系统包括一个轻量级前端,这是一种...
ORB-SLAM总结
标签: slam
本文介绍了ORB-SLAM,这是一种基于特征的单目SLAM系统,可在大小型室内外环境中实时运行。该系统对严重的运动模糊具有鲁棒性,可实现较宽的基线回环和重定位,并包括全自动的初始化。我们基于近年来的出色算法,从头...
ORB-SLAM2源码学习(一)
标签: slam
恒速模型跟踪:上一帧的位姿和速度相乘计算得到当前帧 重定位跟踪:跟踪丢失时使用, 局部地图跟踪:使跟踪更加准确 局部地图点:稀疏点云中的红色点构成的,表示当前帧跟踪到的地图点, ............
ORB-SLAM2是一种基于单目、双目和RGB-D相机的实时视觉SLAM系统,用于在无GPS信号或有限的传感器信息情况下,构建三维地图并定位相机的位置和姿态。ORB-SLAM2采用了ORB特征点提取和描述符匹配技术,以及图优化和闭环...



ORB-SLAM2源码的编译部分有ROS版本和非ROS版本,非ROS版本不需要安装ROS也可以运行,主要针对离线数据集模式。而ROS版本主要针对使用摄像头的在线运行模式。 本篇博客对两种模式的配置均进行介绍,其中ROS版本的...
orbslam2、学习源码和b站视频(up:嘉然今天吃带变)相关

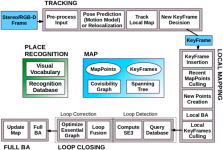
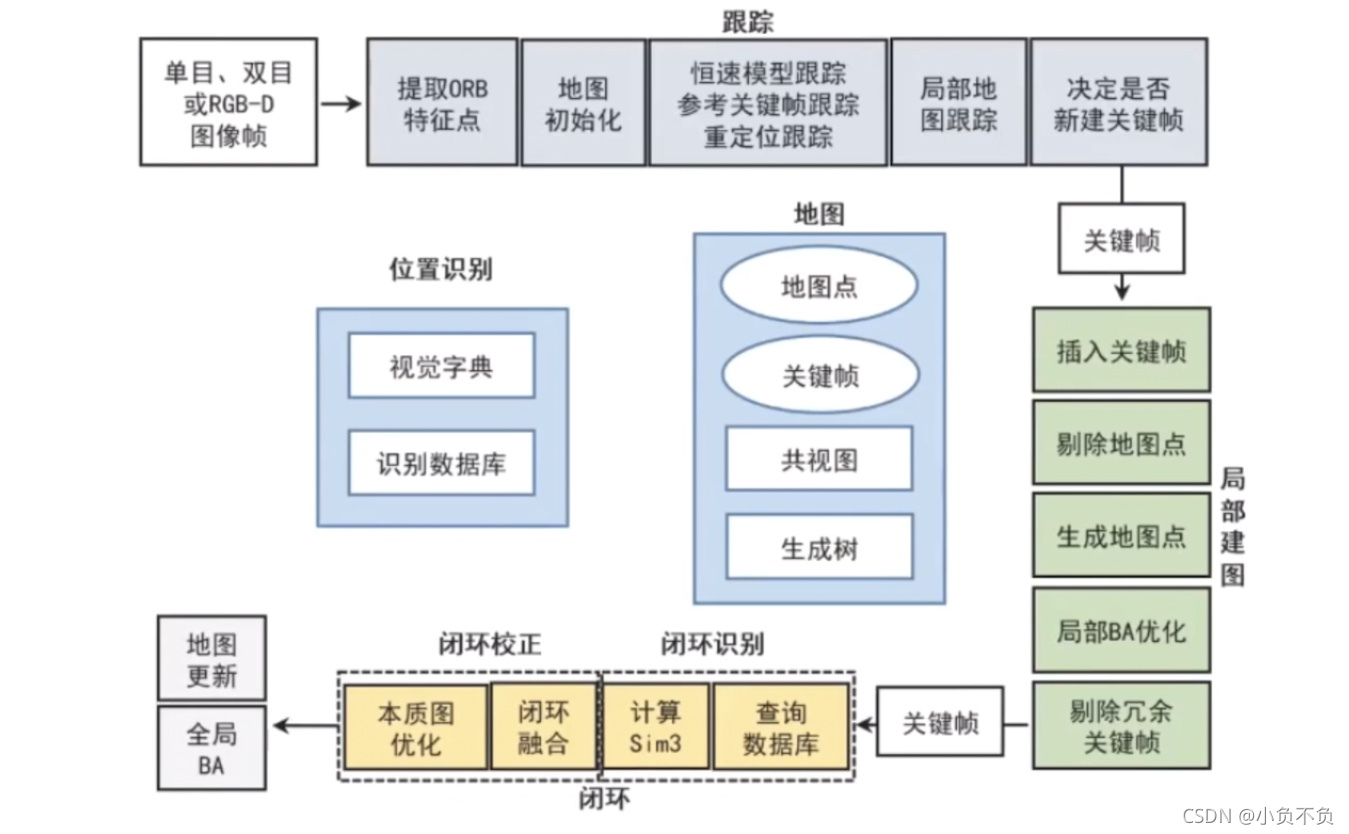
httpblogcsdnnetcicibabearticledetails50728748ORB-SLAM2 基于可识别特征的自主导航与地图构建 简介地图 A 地图特征点或3D ORBB 关键帧C 可视化图像 位置识别 A 图像识别数据库 B 高效优化的ORB匹配C 视觉一致...

单目初始化 由于单目相机没有深度信息,所以要通过初始化确定一个初始的地图信息...那么我们选择哪一种方法来求解呢:对于两种方法求解出的位姿,分别计算重投影误差,得到两个模型的分数,通过比较分数来让ORB-SLAM系.
ORB-SLAM2代码阅读
标签: SLAM
include文件夹存放的是头文件,ORB-SLAM2可以被当作一个库来使用,很多函数都可以直接调用 src文件夹存放的是和include对应的源文件 Thirdparty存放的是用到的第三方库 Vocabulary存放的是回环检测中BoW用到的视觉...
NICE-SLAM一种结合了神经隐式表示和分层场景表示的密集RGB-D SLAM系统。该方法在保持神经隐式表示的表示能力的同时,通过引入分层场景表示来实现可扩展性和效率。具体来说,场景的几何和颜色信息由四个特征网格及其...
本文为ORB-SLAM的翻译,转载自:http://qiqitek.com/blog/?p=102ORB-SLAM: a Versatile and Accurate Monocular SLAM System(文章已发表,有版权)Taylor Guo, 2016年3月18日-9:00原文发表于摘要:本文主要讲了ORB-...

推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地